桃花源记九游客户端
发布日期:2026-02-06 08:58 点击次数:113
人形机器人正加速在3C(计算机、通信、消费电子)与汽车制造等精密工业领域落地应用。在3C产品组装环节,传统机械臂受限于刚性结构,难以完成手机屏幕贴合、芯片插拔等毫米级操作,而人形机器人通过仿生关节设计与多模态感知系统,可模拟人类手指的微米级运动精度,实现从零部件分拣到成品检测的全流程覆盖。
汽车制造领域,人形机器人已突破焊接、喷涂等标准化工序,在总装车间展现出独特优势——其柔性躯干能通过狭窄车门空间,机械臂可自适应调整扭矩完成座椅螺栓紧固,视觉系统实时识别3000余种零部件型号,将传统产线12小时的换型时间压缩至2小时内。这种跨场景适应能力源于深度融合的AI算法与机械工程,使机器人能通过少量示范数据快速学习新任务,在宝马沈阳工厂的试点中,人形机器人已承担20%的柔性装配工作,产品不良率降低至0.03%。
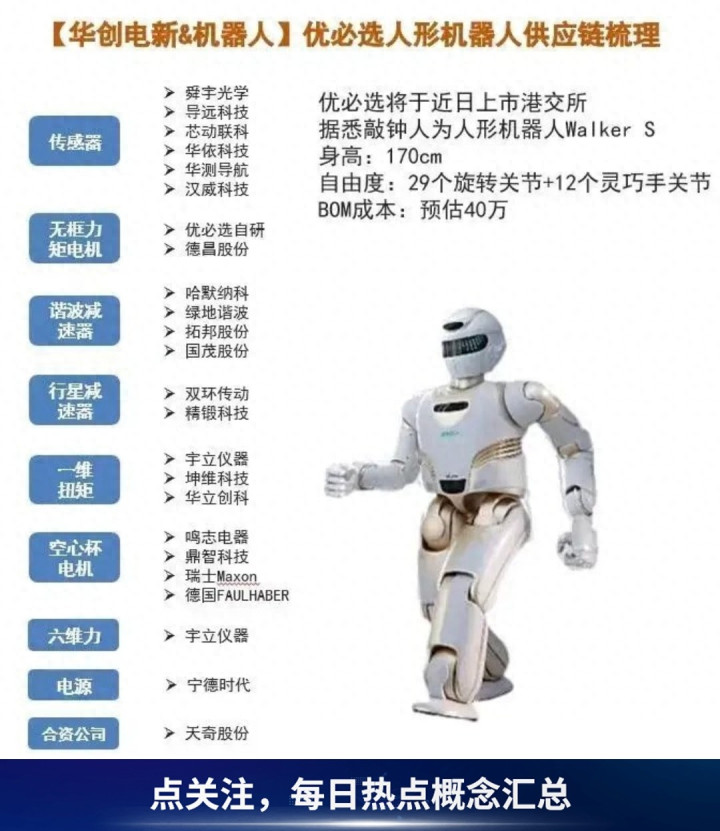
传统压力传感器仅能捕获垂直方向的单一力值,而新型六维力传感器通过弹性体结构创新,在X/Y/Z轴方向布置应变片阵列,配合惠斯通电桥电路,可同步解析切向力、扭矩等复合受力状态。这种技术原理类似人类皮肤中的机械感受器——当手指按压物体时,皮肤变形会激活不同位置的痛觉、触觉神经元,传感器则通过电阻变化模式解码力的空间分布。在精密装配场景中,六维力传感器使机器人能感知0.1牛以下的微小接触力,当机械臂安装汽车仪表盘时,传感器可实时监测12个固定点的受力均衡性,避免因局部应力集中导致面板变形。波士顿动力在Atlas机器人上应用的分布式触觉网络,通过32个独立传感单元覆盖手掌,使其能稳定抓取直径5毫米的电线而不造成损伤。
压阻式传感器采用导电橡胶复合材料,其内部填充的碳纳米管形成三维导电网络,受力时材料形变导致电阻呈非线性变化,这种特性使传感器能捕捉0.01%的应变信号。电容式传感器则通过双层柔性电极与介电层构成变间距电容,当接触面发生微米级形变时,电容值变化可精确反映压力分布。微软研究院开发的GelSight技术更进一步,在透明硅胶层内嵌入彩色微球阵列,通过分析接触面微球的位移图像,可重建物体表面的三维形貌,这种视觉-触觉融合方案使机器人能识别布料的纹理走向,在服装缝制产线实现自动翻折操作。丰田汽车实验室的测试显示,采用多模态触觉传感器的机械臂,在装配发动机活塞环时的成功率提升至99.7%,较传统方案提高42个百分点。
传统方案需将原始信号传输至中央处理器进行复杂运算,导致100毫秒以上的处理延迟,而新一代传感器内置边缘计算芯片,通过现场可编程门阵列(FPGA)实现信号预处理。以施耐德电气的Smart Sensor为例,其集成的高速ADC芯片可在20微秒内完成模数转换,专用数字信号处理器(DSP)同步执行滤波、特征提取等操作,最终仅将关键参数上传至云端。这种架构使机器人能在20毫秒内完成接触状态判断,在汽车焊接场景中,当焊枪与工件接触瞬间,传感器可立即调整电流参数防止飞溅,处理速度较云端计算提升15倍。英伟达Jetson系列边缘计算模块的引入,更使传感器具备运行轻量化深度学习模型的能力,通过端到端学习直接输出操作指令,在半导体晶圆搬运任务中实现零失误操作。
航空级铝合金与碳纤维复合材料的应用,使机器人躯干在保持30公斤自重的同时,可承受200公斤的动态载荷。这种材料组合通过拓扑优化设计,在关键受力部位形成蜂窝状加强结构,既减轻重量又提升抗冲击能力。本田ASIMO机器人的腿部采用双层壳体设计,外层碳纤维承受弯曲应力,内层铝合金传递轴向力,这种结构使其能以2公里/小时的速度稳定行走,遇到障碍物时躯干变形量控制在5毫米以内。在工业场景中,刚性结构确保机器人在高速运动时保持定位精度,ABB YuMi机器人的双臂通过高刚性连杆设计,在协同搬运10公斤工件时,重复定位精度仍可达0.02毫米,满足精密电子元件的装配需求。
基于模型预测控制(MPC)的算法框架,通过建立机器人动力学模型,可提前0.5秒预测身体姿态变化,并计算出最优关节扭矩分配方案。这种前瞻性控制使波士顿动力Atlas机器人能在后空翻落地时,通过髋关节与膝关节的协同屈伸,将冲击力分散至整个下肢结构,避免单点过载。强化学习算法的引入进一步提升了环境适应性,通过在虚拟环境中进行数百万次摔倒-起身训练,机器人学会了利用手臂摆动调整重心,在不平整地面行走时的摔倒概率降低至0.3%。特斯拉Optimus机器人采用的神经网络控制架构,将传感器数据直接映射至关节指令,省去传统控制链中的中间环节,使反应速度提升至100毫秒以内,在汽车产线避障测试中表现出类人级的敏捷性。
视觉、惯性测量单元(IMU)与力觉传感器的数据通过卡尔曼滤波算法进行时空对齐,构建出机器人的三维状态模型。当机械臂抓取物体时,视觉系统识别目标位置,IMU监测手臂加速度,力觉传感器反馈接触力,控制算法综合这些信息实时调整抓取策略。这种融合感知使优必选Walker X机器人能在强光干扰下准确识别工件,在视觉信号丢失时依靠IMU与力觉数据继续完成操作。在汽车涂装车间,多模态感知系统使机器人能根据喷枪压力变化与车身表面反光率,自动调整喷涂轨迹,漆膜厚度均匀性达到98%,较单一传感器方案提升25个百分点。
McKibben肌肉束的仿生设计赋予机器人柔性驱动能力。这种人工肌肉由橡胶管与编织纤维套构成,当向橡胶管内充入压缩空气时,纤维套的约束作用使肌肉沿轴向收缩,同时产生径向膨胀,模拟生物肌肉的等张收缩特性。通过调整进气压力,肌肉束可实现0-30%的线性收缩率,输出力范围覆盖0.1-100牛,满足从精密操作到重物搬运的多场景需求。麻省理工学院研发的McKibben肌肉阵列,通过32个独立气室控制,使机器人手指能完成握拳、捏取等复杂动作,在抓取易碎物品时,肌肉束的柔性缓冲作用使接触力波动幅度降低80%。
采用电磁阀控制气流,开关时间达50毫秒,而新型压电陶瓷阀将响应时间缩短至5毫秒,配合高速比例阀实现压力的连续调节。这种改进使肌肉束的收缩频率提升至10赫兹,接近人类肌肉的20赫兹运动能力。在康复机器人应用中,快速响应特性使外骨骼能实时跟随患者的运动意图,当患者试图站立时,腿部肌肉束可在100毫秒内提供支撑力,较传统液压驱动系统提速3倍。丰田伙伴机器人通过优化气路布局,将肌肉束的充气延迟控制在8毫秒以内,使其能完成乒乓球扣杀等高速动作。
橡胶管在反复伸缩后易出现疲劳裂纹,而新型氢化丁腈橡胶(HNBR)通过分子链交联改性,将耐疲劳次数从10万次提升至500万次。编织纤维套采用芳纶纤维与碳纤维混编工艺,既保持了高强度又提升了柔韧性,使肌肉束能承受10万次以上的弯曲变形而不断裂。在工业搬运场景中,改进后的肌肉束连续工作2年后仍能保持95%的输出力,维护周期从每月一次延长至每年一次。哈佛大学开发的自修复橡胶材料更进一步,当肌肉束表面出现微小裂纹时,材料内的微胶囊会释放修复剂自动填补损伤,使机器人能在核电站等极端环境中长期稳定运行。